OCR 07AP
1.วิธีการควบคุมเอาท์พุทสำหรับวิธีการควบคุมการป้อนซึ่งมีลวดเชื่อมถูกป้อนที่อัตราเร็วในการ
ป้อนลวดโดยเฉลี่ยที่ถูกตัดสินกำหนดไว้ก่อนขณะที่ป้อนไปข้างหน้าและป้อนย้อนกลับโดยสลับกันวนซ้ำ
โดยที่
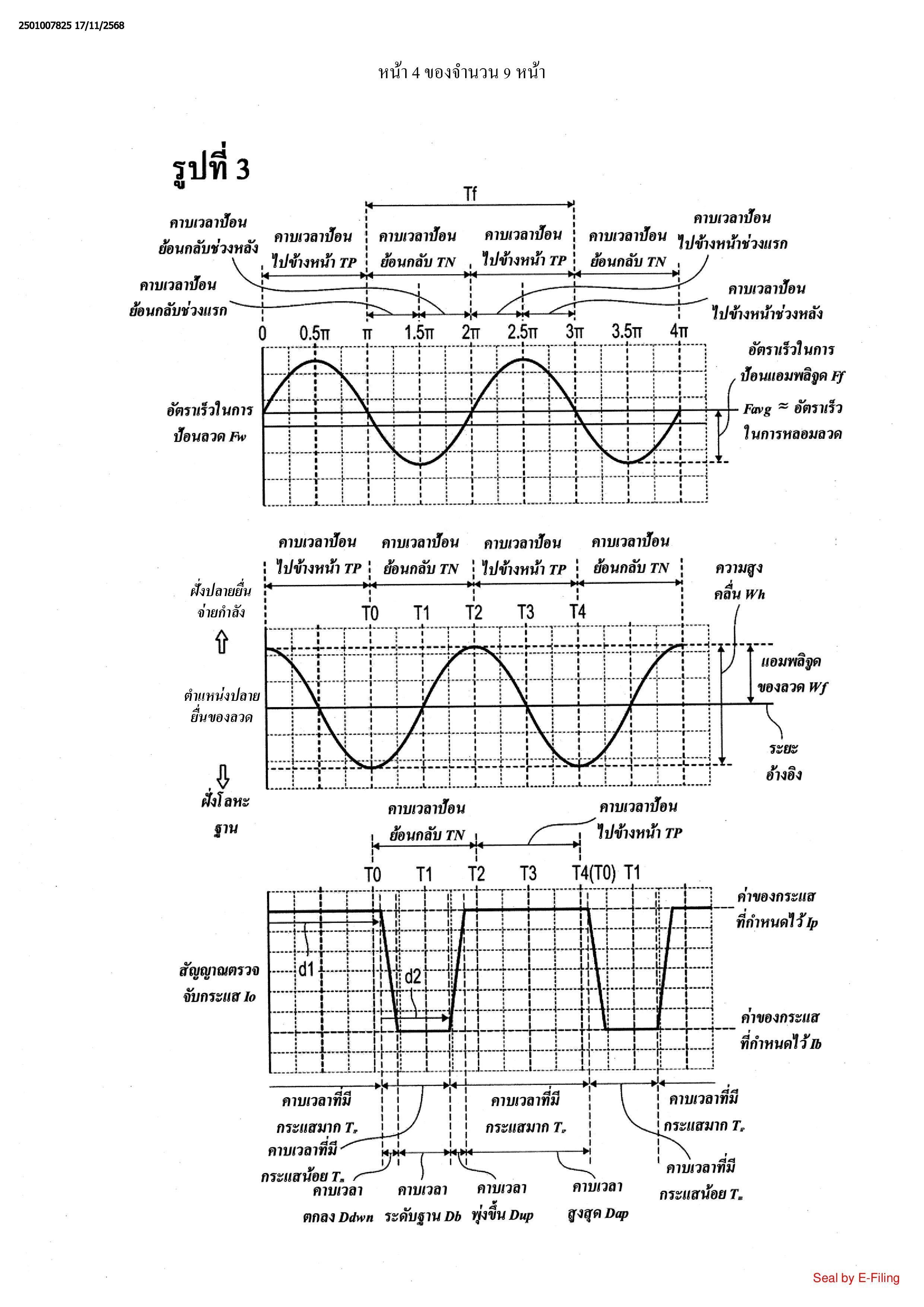
วิธีการควบคุมการป้อนจะรวมถึงวิถีทางสำหรับควบคุมกระแสไฟฟ้าเชื่อมตามตำแหน่งปลายยื่น
ของลวดเชื่อมและวิถีทางสำหรับควบคุมความยาวอาร์กเป็นอย่างน้อย,
วิถีทางสำหรับควบคุมกระแสไฟฟ้าเชื่อมจะรวมถึงขั้นตอนในการควบคุมกระแสไฟฟ้าเชื่อมใน
ระหว่างคาบเวลาที่มีกระแสมาก Tp ซึ่งมีกระแสไฟฟ้าเชื่อมมากกว่ากระแสไฟฟ้าเชื่อมโดยเฉลี่ยที่กำหนดไว้
ก่อนและในระหว่างคาบเวลาที่มีกระแสน้อย Tp ซึ่งมีกระแสไฟฟ้าเชื่อมน้อยกว่ากระแสไฟฟ้าเชื่อมโดยเฉลี่ย
ที่กำหนดไว้ก่อนเป็นอย่างน้อย และ
วิถีทางสำหรับควบคุมความยาวอาร์กจะรวมถึง
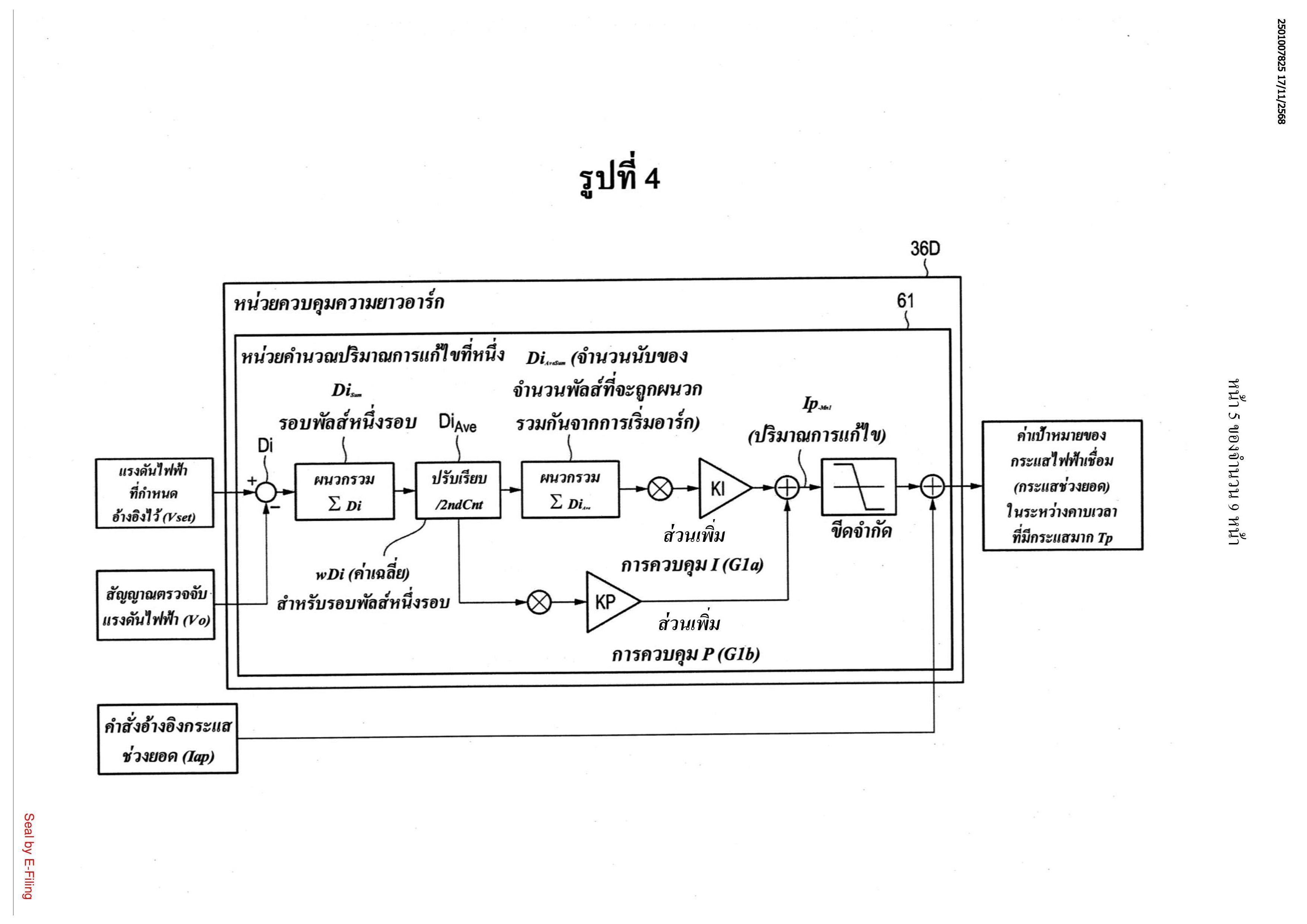
ขั้นตอนในการคำนวณการเบี่ยงเบนแรงดันไฟฟ้าฉับพลัน Di โดยอิงตามผลต่างระหว่าง
แรงดันไฟฟ้าที่กำหนดอ้างอิงไว้ Vset กับสัญญาณตรวจจับแรงดันไฟฟ้า Vo สำหรับรอบการควบคุมแต่ละ
รอบ
ขั้นตอนในการผนวกรวมค่าที่คำนวณได้ของการเบี่ยงเบนแรงดันไฟฟ้าฉับพลัน Di และ
การคำนวณค่าผนวกรวมการเบี่ยงเบนแรงดันไฟฟ้าฉับพลัน DiSum สำหรับรอบการควบคุมแต่ละรอบ
ขั้นตอนในการคำนวณการเบี่ยงเบนแรงดันไฟฟ้าโดยเฉลี่ย DiAve โดยอิงตามคำผนวกรวม
การเบี่ยงเบนแรงดันไฟฟ้าฉับพลัน DiSum สำหรับคาบเวลาที่กำหนดไว้แต่ละคาบโดยมีคาบเวลาที่กำหนดไว้
ซึ่งตัดสินกำหนดไว้ก่อนว่าเป็นหนึ่งรอบ
ขั้นตอนในการผนวกรวมค่าที่คำนวณได้ของการเบี่ยงเบนแรงดันไฟฟ้าโดยเฉลี่ย DiAve
สำหรับจำนวนของคาบเวลาที่กำหนดไว้ในแต่ละจำนวนและการคำนวณค่าผนวกรวมการเบี่ยงเบน
แรงดันไฟฟ้าโดยเฉลี่ย DiAvesum'
ขั้นตอนในการคำนวณปริมาณการแก้ไขที่หนึ่ง Ip-Mn1 ของกระแสไฟฟ้าเชื่อมในระหว่าง
คาบเวลาที่มีกระแสมาก Tp โดยอิงตามค่าผนวกรวมการเบี่ยงเบนแรงดันไฟฟ้าโดยเฉลี่ย DiAvesum และส่วน
เพิ่มที่กำหนดไว้ก่อนหนึ่งค่าหรือมากกว่านั้นเป็นอย่างน้อย
ขั้นตอนในการคำนวณค่าเป้าหมาย Ipหพ ของกระแสไฟฟ้าเชื่อมในระหว่างคาบเวลาที่มี
กระแสมาก Tp ในคาบเวลาที่กำหนดไว้ต่อไปโดยอิงตามปริมาณการแก้ไข Ip-Mn1 และ
ขั้นตอนในการตัดสินกำหนดค่าคำสั่งควบคุมกระแสไฟฟ้าเชื่อมในระหว่างคาบเวลาที่มี
กระแสมาก Tp โดยอิงตามค่าเป้าหมาย Ipsr
2.วิธีการควบคุมเอาท์พุทตามข้อถือสิทธิ 1 โดยที่
ในขั้นตอนในการคำนวณการเบี่ยงเบนแรงดันไฟฟ้าโดยเฉลี่ย DiAve ซึ่งถูกรวมไว้ในวิถีทางสำหรับ
ควบคุมความยาวอาร์กนั้น
จำนวนนับ PlsCycCnt ซึ่งถูกนับสำหรับคาบเวลาที่กำหนดไว้แต่ละคาบจะถูกคำนวณจากการเริ่ม
อาร์ก และ
ในคาบเวลาที่กำหนดไว้นั้น การเบี่ยงเบนแรงดันไฟฟ้าโดยเฉลี่ย DiAve สำหรับคาบเวลาที่กำหนดไว้
แต่ละคาบจะถูกคำนวณโดยใช้ค่าผนวกรวมการเบี่ยงเบนแรงดันไฟฟ้าฉับพลัน DiSum ในคาบเวลาที่กำหนด
ไว้ก่อนและจำนวนนับ PisCycCnt ตามนิพจน์ที่ 1 ต่อไปนี้:
DiSum/PlsCycCnt....นิพจน์ที่ 1
3. วิธีการควบคุมเอาท์พุทตามข้อถือสิทธิ 2 โดยที่
คาบเวลาที่กำหนดไว้จะเป็นสิ่งต่อไปนี้อย่างน้อยหนึ่งอย่าง:
รอบไปข้างหน้าและย้อนกลับของลวดโดยมีคาบเวลาป้อนไปข้างหน้าและคาบเวลาป้อน
ย้อนกลับว่าเป็นหนึ่งรอบ
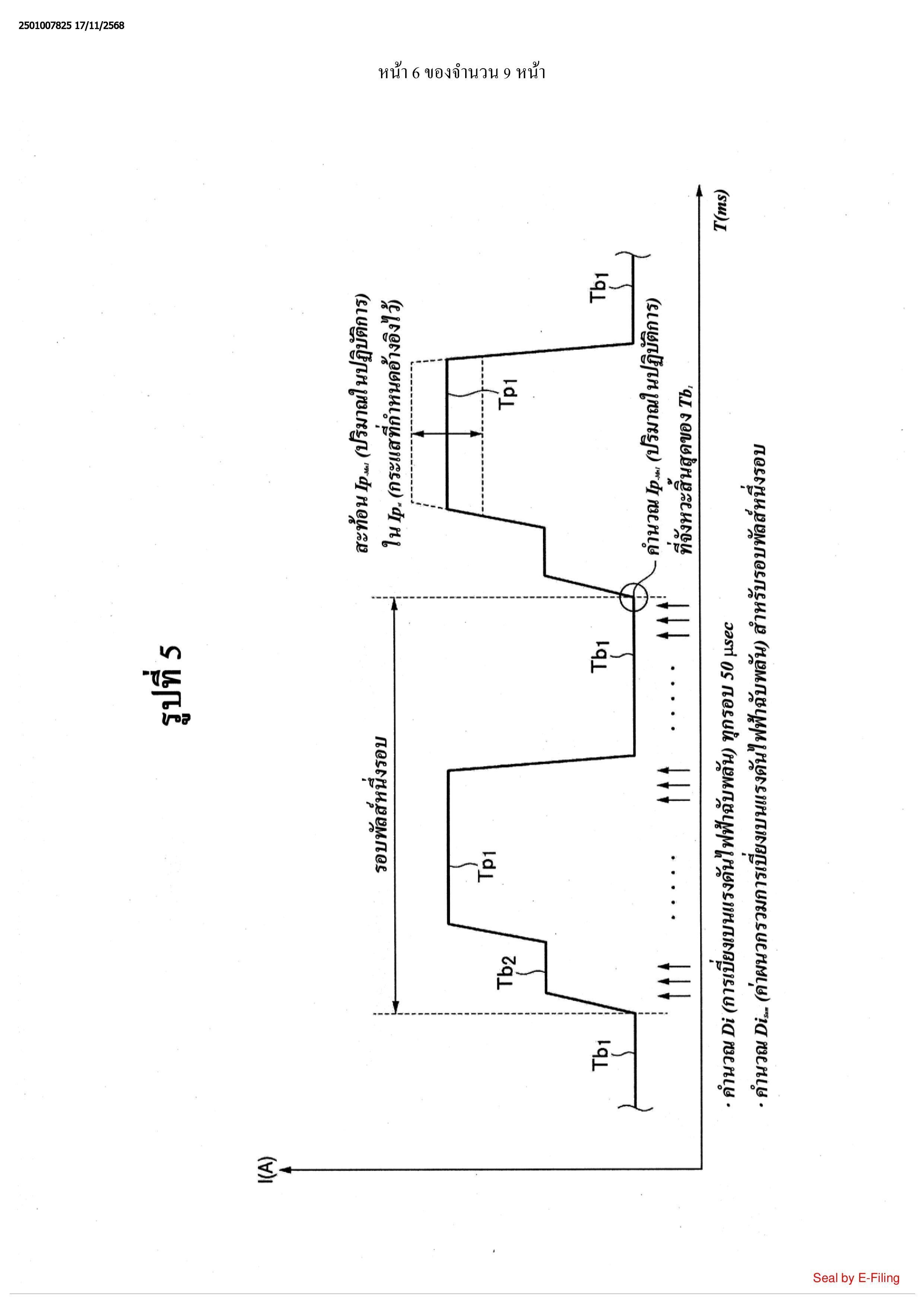
รอบพัลส์โดยมีคาบเวลาที่มีกระแสมาก Tp และคาบเวลาที่มีกระแสน้อย Tb เป็นหนึ่งรอบ
รอบไปข้างหน้าและย้อนกลับของลวดหลายรอบ และ
รอบพัลส์หลายรอบ
4.วิธีการควบคุมเอาท์พุทตามข้อถือสิทธิ 2 โดยที่
คาบเวลาที่กำหนดไว้ก่อนจะถูกกำหนดให้กับจุดสิ้นสุดของคาบเวลาที่มีกระแสน้อย Tb เมื่อ
คาบเวลาที่มีกระแสน้อย Tb รวมถึงส่วนเดียวและถูกกำหนดให้กับจุดสิ้นสุดของส่วนใดส่วนหนึ่งเมื่อ
คาบเวลาที่มีกระแสน้อย Tb รวมถึงส่วนมากกว่าหนึ่งส่วน
5. วิธีการควบคุมเอาท์พุทตามข้อถือสิทธิ 1 โดยที่
ในขั้นตอนในการคำนวณค่าเป้าหมาย Ipsr ของกระแสไฟฟ้าเชื่อมนั้น
ค่าเป้าหมาย Ip.จะถูกคำนวณ โดยอิงตามผลรวมของปริมาณการแก้ไขที่หนึ่ง1 IpMn-ap กับกระแสที่
กำหนดอ้างอิงไว้ Ipst ในระหว่างคาบเวลาที่มีกระแสมาก Tp เป็นอย่างน้อย และ
กระแสที่กำหนดอ้างอิงไว้ Ipst จะถูกตัดสินกำหนดตามเงื่อนไขต่อไปนี้อย่างน้อยหนึ่งอย่าง:ค่า
กำหนดอัตราเร็วในการป้อน, ชนิดของลวดเชื่อม, เส้นผ่านศูนย์กลางลวดของลวดเชื่อม, และชนิดของก๊าซ
คลุม
6. วิธีการควบคุมเอาท์พุทตามข้อถือสิทธิ 1 โดยที่
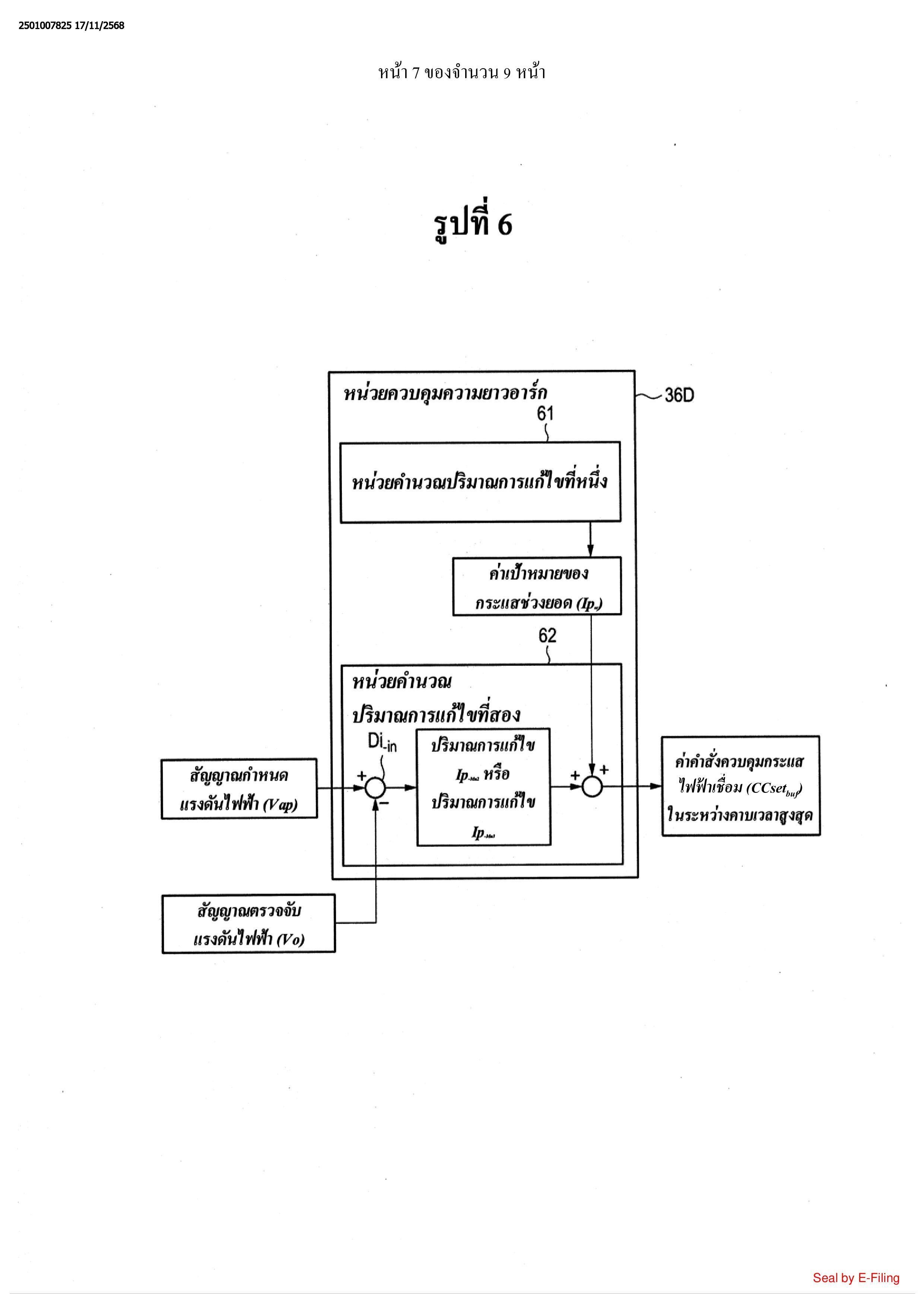
วิถีทางสำหรับควบคุมความยาวอาร์กยังรวมเพิ่มเติมถึง
โดยอิงตามผลต่างระหว่างสัญญาณกำหนดแรงดันไฟฟ้าที่กำหนดใหม่อีก Vap ในระหว่าง
คาบเวลาที่มีกระแสมาก Tp กับสัญญาณตรวจจับแรงดันไฟฟ้า Vo สำหรับรอบการควบคุมแต่ละรอบใน
ระหว่างคาบเวลาที่มีกระแสมาก Tp ในคาบเวลาที่กำหนดไว้ปัจจุบัน:
ขั้นตอนในการคำนวณการเบี่ยงเบนแรงดันไฟฟ้าฉับพลัน Di-in ในระหว่างคาบเวลาที่มี
กระแสมาก Tp,
ขั้นตอนในการคำนวณปริมาณการแก้ไขที่สอง Ip-Mn2 สำหรับรอบการควบคุมแต่ละรอบ
โดยอิงตามการเบี่ยงเบนแรงดันไฟฟ้าฉับพลัน Di-in ในระหว่างคาบเวลาที่มีกระแสมาก Tp และส่วนเพิ่มที่
กำหนดไว้ก่อนหนึ่งค่าหรือมากกว่านั้นเป็นอย่างน้อย, และ
ขั้นตอนในการคำนวณค่าคำสั่งควบคุมกระแสไฟฟ้าเชื่อมที่แก้ไขแล้ว CCBuf โดยอิงตาม
ปริมาณการแก้ไข Ip-Mn2. และค่าเป้าหมาย Ipsr สำหรับรอบการควบคุมแต่ละรอบ
7.วิธีการควบคุมเอาท์พุทตามข้อถือสิทธิ 1 โดยที่
วิถีทางสำหรับควบคุมความยาวอาร์กยังรวมเพิ่มเติมถึง
โดยอิงตามผลต่างระหว่างสัญญาณกำหนดแรงดันไฟฟ้าที่กำหนดใหม่อีก Vap ในระหว่าง
คาบเวลาที่มีกระแสมาก Tp กับสัญญาณตรวจจับแรงดันไฟฟ้า Vo สำหรับรอบการควบคุมแต่ละรอบใน
ระหว่างคาบเวลาที่มีกระแสมาก Tp ในคาบเวลาที่กำหนดไว้ปัจจุบัน:
ขั้นตอนในการคำนวณการเบี่ยงเบนแรงดันไฟฟ้าฉับพลัน Di-in ในระหว่างคาบเวลาที่มี
กระแสมาก Tp,
ขั้นตอนในการคำนวณปริมาณการแก้ไขที่สอง Ip-Mn2 สำหรับรอบการควบคุมแต่ละรอบ
โดยอิงตามการเบี่ยงเบนแรงดันไฟฟ้าฉับพลัน Di-in ในระหว่างคาบเวลาที่มีกระแสมาก Tp และส่วนเพิ่มที่
กำหนดไว้ก่อนหนึ่งค่าหรือมากกว่านั้นเป็นอย่างน้อย,และ
ขั้นตอนในการคำนวณค่าคำสั่งควบคุมกระแสไฟฟ้าเชื่อมที่แก้ไขแล้ว CCsetBufโดยอิงตาม
ปริมาณการแก้ไขที่สอง Ip-Mn2 และค่าเป้าหมาย Ipsr ที่จุดควบคุมเวลาที่สอดคล้องกับจุดเริ่มต้นของคาบเวลาที่
มีกระแสมาก Tp ในรอบการควบคุมและการคำนวณค่าคำสั่งควบคุมกระแสไฟฟ้าเชื่อมที่แก้ไขแล้ว CCsetBuf
โดยอิงตามค่าคำสั่งควบคุมกระแสไฟฟ้าเชื่อมที่คำนวณไว้ก่อนหน้านี้ CCsetBuf-old และปริมาณการแก้ไข Ip.
Mn2 ที่จุดควบคุมเวลาถัดมาและหลังจากนั้น
8.วิธีการควบคุมเอาท์พุทตามข้อถือสิทธิ 1 โดยที่
วิถีทางสำหรับควบคุมความยาวอาร์กยังรวมเพิ่มเติมถึง
โดยอิงตามผลต่างระหว่างสัญญาณกำหนดแรงดันไฟฟ้าที่กำหนดใหม่อีก Vap ในระหว่าง
คาบเวลาที่มีกระแสมาก Tp กับสัญญาณตรวจจับแรงดันไฟฟ้า Vo สำหรับรอบการควบคุมแต่ละรอบใน
ระหว่างคาบเวลาที่มีกระแสมาก Tp ในคาบเวลาที่กำหนดไว้ปัจจุบัน:
ขั้นตอนในการคำนวณการเบี่ยงเบนแรงดันไฟฟ้าฉับพลัน Di-in ในระหว่างคาบเวลาที่มี
กระแสมาก Tp,
ขั้นตอนในการผนวกรวมค่าที่คำนวณได้ของการเบี่ยงเบนแรงดันไฟฟ้าฉับพลัน Di-in ใน
ระหว่างคาบเวลาที่มีกระแสมาก Tp และการคำนวณค่าผนวกรวมการเบี่ยงเบนแรงดันไฟฟ้าฉับพลัน Di-inSum
ในระหว่างคาบเวลาที่มีกระแสมาก Tp สำหรับรอบการควบคุมแต่ละรอบ,
ขั้นตอนในการคำนวณปริมาณการแก้ไขที่สาม Ip สำหรับรอบการควบคุมแต่ละรอบ
โดยอิงตามค่าผนวกรวมการเบี่ยงเบนแรงดันไฟฟ้าฉับพลัน Di inSum ในระหว่างคาบเวลาที่มีกระแสมาก Tp
และส่วนเพิ่มที่กำหนดไว้ก่อนหนึ่งค่าหรือมากกว่านั้นเป็นอย่างน้อย และ
ขั้นตอนในการคำนวณค่าคำสั่งควบคุมกระแสไฟฟ้าเชื่อมที่แก้ไขแล้ว CCsetBuf สำหรับ
รอบการควบคุมแต่ละรอบโดยอิงตามปริมาณการแก้ไข Ip-Mn3 และค่าเป้าหมาย Ipsr
9. วิธีการควบคุมเอาท์พุทตามข้อถือสิทธิ 1 และ 6 ถึง 8 ข้อใดข้อหนึ่ง โดยที่
เมื่อมีส่วนมากกว่าหนึ่งส่วนซึ่งมีเงื่อนไขในการเชื่อมที่แตกต่างกันถูกกำหนดในคาบเวลาที่มีกระแส
มาก Tp และคาบเวลาที่มีกระแสน้อย Tb อย่างน้อยหนึ่งคาบ
สำหรับปริมาณการแก้ไขที่หนึ่ง Ip-Mn1 ปริมาณการแก้ไข Ip-Mn1-1 ก็จะถูกตัดสินกำหนดตามตัวแปร
อัตราส่วนที่กำหนดไว้ก่อน Mn-R ในส่วนใดส่วนหนึ่งหรือส่วนมากกว่าหนึ่งส่วน และค่าเป้าหมาย Ipsr ของ
กระแสไฟฟ้าเชื่อมในระหว่างคาบเวลาที่มีกระแสมาก Tp จะถูกคำนวณ
10. วิธีการควบคุมเอาท์พุทตามข้อถือสิทธิ 9 โดยที่
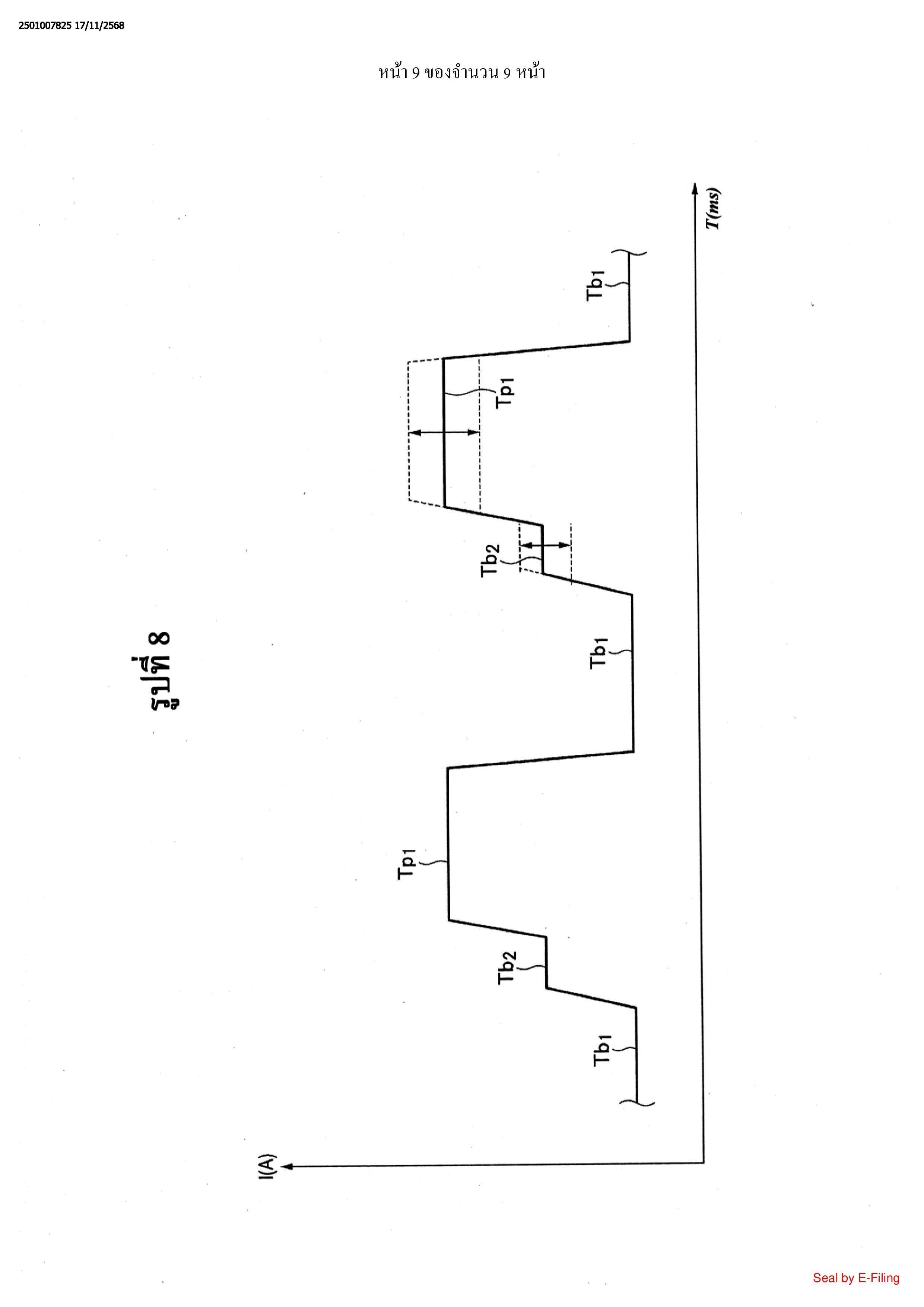
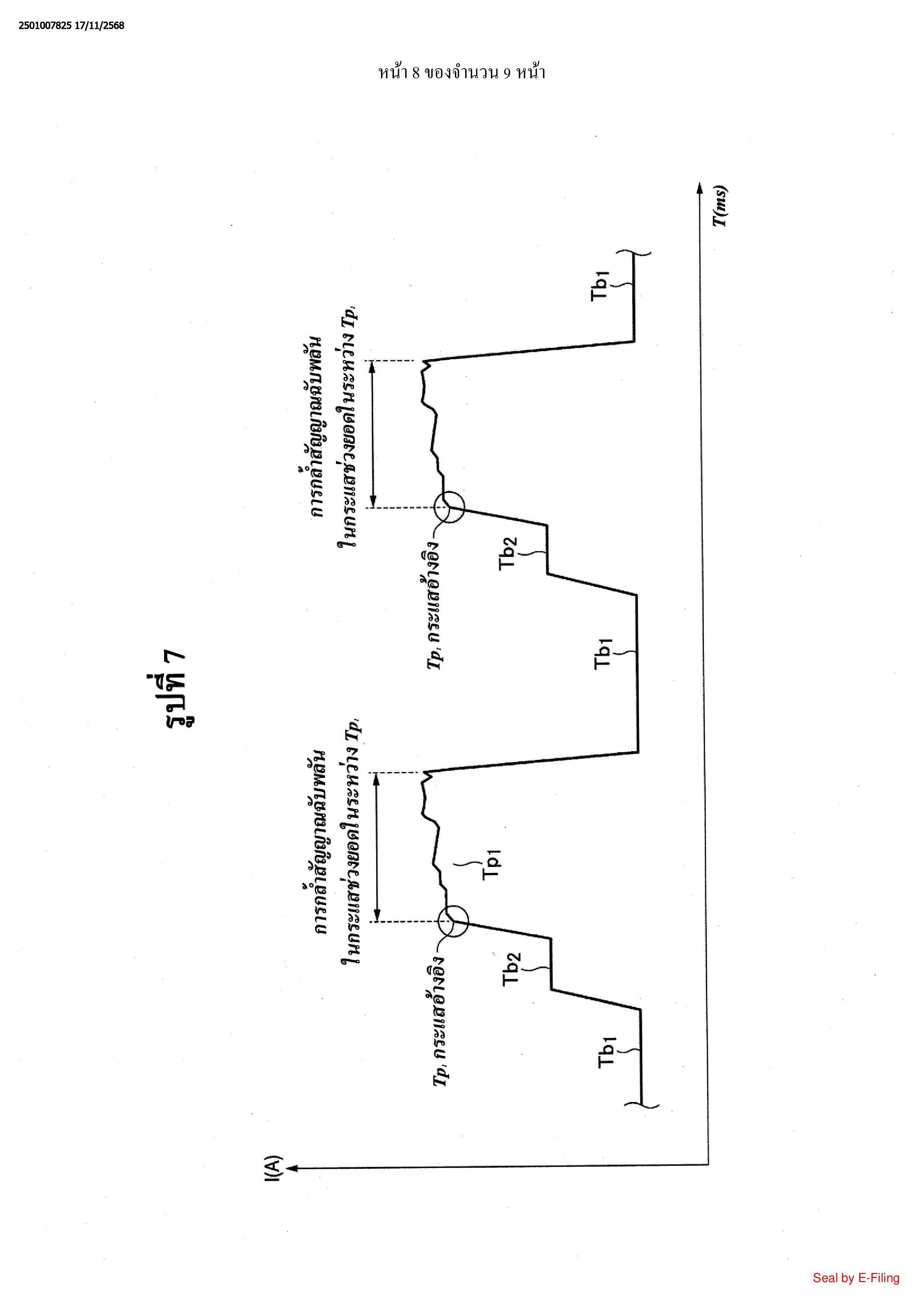
คาบเวลาที่มีกระแสน้อย Tb จะรวมถึงส่วน Tb1 และส่วน Tb2 ซึ่งมีเงื่อนไขในการเชื่อมที่แตกต่าง
กัน,
วิถีทางสำหรับควบคุมความยาวอาร์กยังรวมเพิ่มเติมถึง
ขั้นตอนในการคำนวณค่าเป้าหมาย Ib2sr ของกระแสไฟฟ้าเชื่อมในส่วน Tb เมื่อส่วน Tb
อยู่บนด้านพุ่งขึ้นของคาบเวลาที่มีกระแสมาก Tp, และ
ขั้นตอนในการตัดสินกำหนดค่าคำสั่งควบคุมกระแสไฟฟ้าเชื่อมในส่วน Tb, โดยอิงตามค่า
เป้าหมาย Ib2sr, และ
ในขั้นตอนในการคำนวณค่าเป้าหมาย Ib2sr ของกระแสไฟฟ้าเชื่อมนั้น
ปริมาณการแก้ไข Ib2-Mn ของกระแสไฟฟ้าเชื่อมในส่วน Tb2 จะถูกคำนวณโดยอิงตาม
ปริมาณการแก้ไขที่หนึ่ง Ip-Mn1 และตัวแปรอัตราส่วนที่ตัดสินกำหนดไว้ก่อน Mn-R, และ
ค่าเป้าหมาย Ib2sr จะถูกคำนวณ โดยอิงตามผลรวมของปริมาณการแก้ไข Ib2-Mn กับกระแสที่
กำหนดอ้างอิงไว้ Ib2 ในส่วน Tb2
11. วิธีการควบคุมเอาท์พุทตามข้อถือสิทธิ 1 โดยที่
วิธีการควบคุมการป้อนจะเป็นวิธีการป้อนลวดเชื่อมที่อัตราเร็วในการป้อนลวดโดยเฉลี่ยที่ถูกตัดสิน
กำหนดไว้ก่อนขณะที่ป้อนไปข้างหน้าและป้อนย้อนกลับซ้ำเป็นระยะตามความถี่แบบไปข้างหน้าและ
ย้อนกลับของลวดโดยมีคาบเวลาป้อนไปข้างหน้าและคาบเวลาป้อนย้อนกลับเป็นหนึ่งรอบ
12. วิธีการควบคุมเอาท์พุทตามข้อถือสิทธิ 1 โดยที่
เมื่อเฟสตำแหน่งลวดซึ่งอิงตามตำแหน่งปลายยื่นของลวดเชื่อมในเวลาสับเปลี่ยนจากคาบเวลาป้อน
ย้อนกลับไปเป็นคาบเวลาป้อนไปข้างหน้าถูกกำหนดให้อยู่ที่ 0 องศา
คาบเวลาที่มีกระแสมาก Tp ก็จะถูกสับเปลี่ยนไปเป็นคาบเวลาที่มีกระแสน้อย Tb ที่เฟสตำแหน่ง
ลวดซึ่งถูกกำหนดให้อยู่ในช่วง 100องศา ถึง 200องศา
13. วิธีการควบคุมเอาท์พุทตามข้อถือสิทธิ 1 โดยที่
ค่าระหว่างเฟสตำแหน่งลวดจากจุดที่ซึ่งคาบเวลาที่มีกระแสมาก Tp ถูกสับเปลี่ยนไปเป็นคาบเวลาที่
มีกระแสน้อย Tb ไปจนถึงจุดที่ซึ่งคาบเวลาที่มีกระแสน้อย Tb ถูกสับเปลี่ยนไปเป็นคาบเวลาที่มีกระแสมาก
Tp จะถูกกำหนดให้อยู่ในช่วง 0องศา ถึง 270องศา
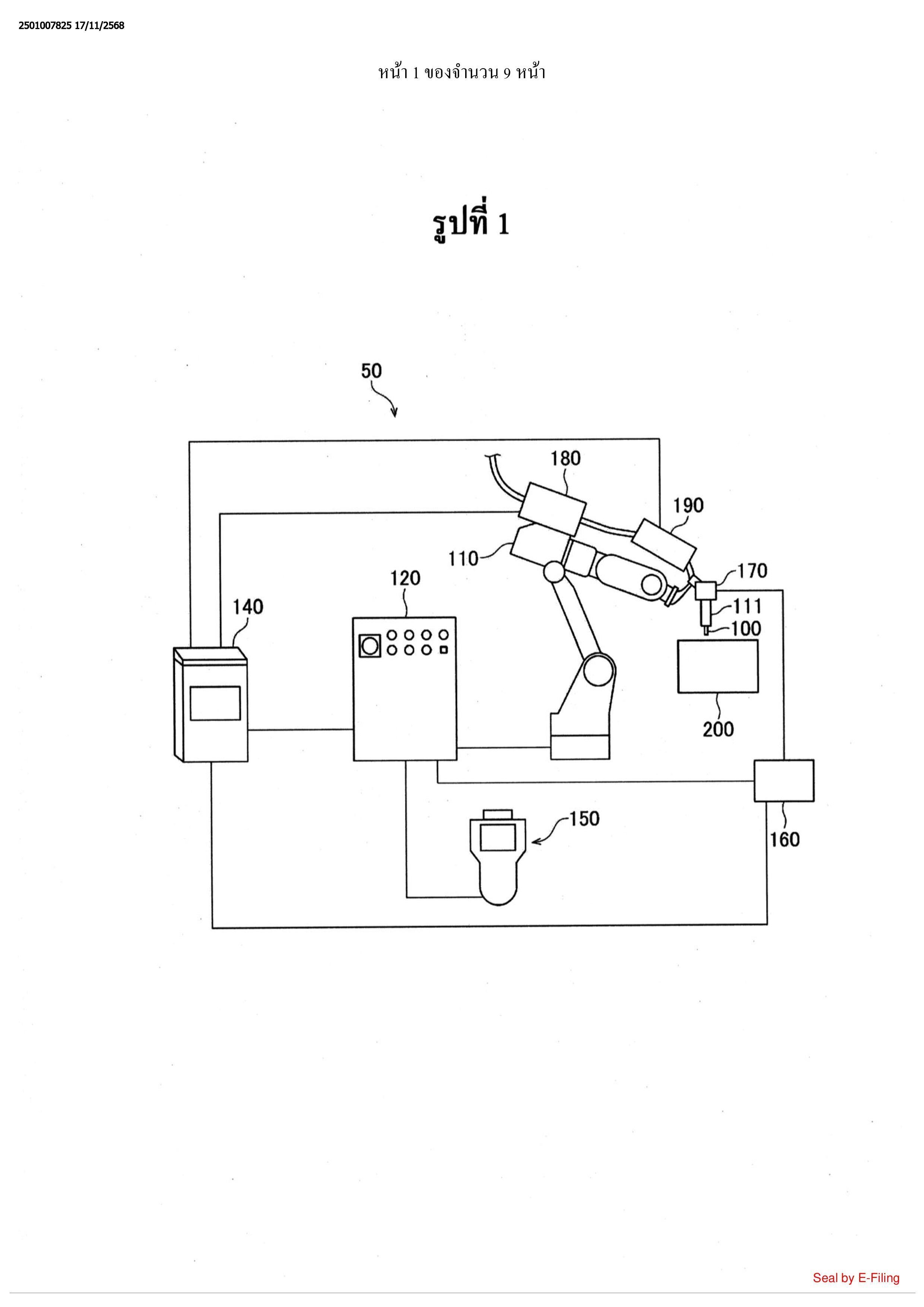
14. แหล่งจ่ายกำลังสำหรับทำการเชื่อมซึ่งถูกใช้สำหรับเชื่อมโดยอิงตามวิธีการควบคุมการป้อนซึ่งมี
ลวดเชื่อมถูกป้อนที่อัตราเร็วในการป้อนลวดโดยเฉลี่ยที่ถูกตัดสินกำหนดไว้ก่อนขณะที่ป้อนไปข้างหน้าและ
ป้อนย้อนกลับซ้ำโดยสลับกัน โดยที่แหล่งจ่ายกำลังสำหรับทำการเชื่อมจะประกอบรวมด้วย:
วิถีทางสำหรับควบคุมกระแสไฟฟ้าเชื่อมตามตำแหน่งปลายยื่นของลวดเชื่อมและวิถีทางสำหรับ
ควบคุมความยาวอาร์กเป็นอย่างน้อย โดยที่
วิถีทางสำหรับควบคุมกระแสไฟฟ้าเชื่อมจะรวมถึงการควบคุมกระแสไฟฟ้าเชื่อมในระหว่าง
คาบเวลาที่มีกระแสมาก Tp ซึ่งมีกระแสไฟฟ้าเชื่อมมากกว่ากระแสไฟฟ้าเชื่อมโดยเฉลี่ยที่กำหนดไว้ก่อน
และในระหว่างคาบเวลาที่มีกระแสน้อย Tp ซึ่งมีกระแสไฟฟ้าเชื่อมน้อยกว่ากระแสไฟฟ้าเชื่อมโดยเฉลี่ยที่
กำหนดไว้ก่อนเป็นอย่างน้อย และ
วิถีทางสำหรับควบคุมความยาวอาร์กจะรวมถึง
การคำนวณการเบี่ยงเบนแรงดันไฟฟ้าฉับพลัน Di โดยอิงตามผลต่างระหว่างแรงดันไฟฟ้า
ที่กำหนดอ้างอิงไว้ Vset กับสัญญาณตรวจจับแรงดันไฟฟ้า Vo สำหรับรอบการควบคุมแต่ละรอบ,
การผนวกรวมค่าที่คำนวณ ได้ของการเบี่ยงเบนแรงดันไฟฟ้าฉับพลัน Di และการคำนวณค่า
ผนวกรวมการเบี่ยงเบนแรงดันไฟฟ้าฉับพลัน DiSum สำหรับรอบการควบคุมแต่ละรอบ,
การคำนวณการเบี่ยงเบนแรงดันไฟฟ้าโดยเฉลี่ย DiAve โดยอิงตามค่าผนวกรวมการเบี่ยงเบน
แรงดันไฟฟ้าฉับพลัน DiSum สำหรับคาบเวลาที่กำหนดไว้แต่ละคาบโดยมีคาบเวลาที่กำหนดไว้ซึ่งตัดสิน
กำหนดไว้ก่อนเป็นหนึ่งรอบ,
การผนวกรวมค่าที่คำนวณได้ของการเบี่ยงเบนแรงดันไฟฟ้าโดยเฉลี่ย DiAve และการ
คำนวณค่าผนวกรวมการเบี่ยงเบนแรงดันไฟฟ้าโดยเฉลี่ย DiAveSum สำหรับคาบเวลาที่กำหนดไว้แต่ละคาบ
การคำนวณปริมาณการแก้ไขที่หนึ่ง Ip-Mn1 ของกระแสไฟฟ้าเชื่อมในระหว่างคาบเวลาที่มี
กระแสมาก Tp โดยอิงตามค่าผนวกรวมการเบี่ยงเบนแรงดันไฟฟ้าโดยเฉลี่ย DiAveSum และส่วนเพิ่มที่กำหนด
ไว้ก่อนหนึ่งค่าหรือมากกว่านั้นเป็นอย่างน้อย
การคำนวณค่าเป้าหมาย Ipsr ของกระแสไฟฟ้าเชื่อมในระหว่างคาบเวลาที่มีกระแสมาก Tp
ในคาบเวลาที่กำหนดไว้ต่อไปโดยอิงตามปริมาณการแก้ไข Ip-Mn1 และ
การตัดสินกำหนดค่าคำสั่งควบคุมกระแสไฟฟ้าเชื่อมในระหว่างคาบเวลาที่มีกระแสมาก
Tp โดยอิงตามค่าเป้าหมาย Ipsr
15. ระบบการเชื่อมซึ่งถูกใช้สำหรับเชื่อมโดยอิงตามวิธีการควบคุมการป้อนซึ่งมีลวดเชื่อมถูกป้อนที่
อัตราเร็วในการป้อนลวดโดยเฉลี่ยที่ถูกตัดสินกำหนดไว้ก่อนขณะที่ป้อนไปข้างหน้าและป้อนย้อนกลับซ้ำ
โดยสลับกัน โดยที่ระบบการเชื่อมจะประกอบรวมด้วย:
วิถีทางสำหรับควบคุมกระแสไฟฟ้าเชื่อมตามตำแหน่งปลายยื่นของลวดเชื่อมและวิถีทางสำหรับ
ควบคุมความยาวอาร์กเป็นอย่างน้อย โดยที่
วิถีทางสำหรับควบคุมกระแสไฟฟ้าเชื่อมจะรวมถึงการควบคุมกระแสไฟฟ้าเชื่อมในระหว่าง
คาบเวลาที่มีกระแสมาก Tp ซึ่งมีกระแสไฟฟ้าเชื่อมมากกว่ากระแสไฟฟ้าเชื่อมโดยเฉลี่ยที่กำหนดไว้ก่อน
และในระหว่างคาบเวลาที่มีกระแสน้อย Tb ซึ่งมีกระแสไฟฟ้าเชื่อมน้อยกว่ากระแสไฟฟ้าเชื่อมโดยเฉลี่ยที่
กำหนดไว้ก่อนเป็นอย่างน้อย และ
วิถีทางสำหรับควบคุมความยาวอาร์กจะรวมถึง
การคำนวณการเบี่ยงเบนแรงดันไฟฟ้าฉับพลัน Di โดยอิงตามผลต่างระหว่างแรงดันไฟฟ้า
ที่กำหนดอ้างอิงไว้ Vset กับสัญญาณตรวจจับแรงดันไฟฟ้า Vo สำหรับรอบการควบคุมแต่ละรอบ,
การผนวกรวมค่าที่คำนวณได้ของการเบี่ยงเบนแรงดันไฟฟ้าฉับพลัน Di และการคำนวณค่า
ผนวกรวมการเบี่ยงเบนแรงดันไฟฟ้าฉับพลัน DiSum สำหรับรอบการควบคุมแต่ละรอบ,
การคำนวณการเบี่ยงเบนแรงดันไฟฟ้าโดยเฉลี่ย DiAve โดยอิงตามค่าผนวกรวมการเบี่ยงเบน
แรงดันไฟฟ้าฉับพลัน DiSum สำหรับคาบเวลาที่กำหนดไว้แต่ละคาบโดยมีคาบเวลาที่กำหนดไว้ซึ่งตัดสิน
กำหนดไว้ก่อนเป็นหนึ่งรอบ,
การผนวกรวมค่าที่คำนวณได้ของการเบี่ยงเบนแรงดันไฟฟ้าโดยเฉลี่ย DiAve สำหรับจำนวน
ของคาบเวลาที่กำหนดไว้แต่ละจำนวนและการคำนวณค่าผนวกรวมการเบี่ยงเบนแรงดันไฟฟ้าโดยเฉลี่ย
DiAveSum สำหรับคาบเวลาที่กำหนดไว้แต่ละคาบ,
การคำนวณปริมาณการแก้ไขที่หนึ่ง Ip-Mn1 ของกระแสไฟฟ้าเชื่อมในระหว่างคาบเวลาที่มี
กระแสมาก Tp โดยอิงตามค่าผนวกรวมการเบี่ยงเบนแรงดันไฟฟ้า โดยเฉลี่ย DiAveSum และส่วนเพิ่มที่กำหนด
ไว้ก่อนหนึ่งค่าหรือมากกว่านั้นเป็นอย่างน้อย
การคำนวณค่าเป้าหมาย Ipsr ของกระแสไฟฟ้าเชื่อมในระหว่างคาบเวลาที่มีกระแสมาก Tp
ในคาบเวลาที่กำหนดไว้ต่อไปโดยอิงตามปริมาณการแก้ไข Ip-Mn1 และ
การตัดสินกำหนดค่าคำสั่งควบคุมกระแสไฟฟ้าเชื่อมในระหว่างคาบเวลาที่มีกระแสมาก
Tp โดยอิงตามค่าเป้าหมาย Ipsr